Written by Matin Sharkawi
Why do we need to remove the background?
Unfortunately, London is plagued by a constant orange haze of light pollution. For the purposes of our project, light pollution harms our data as it adds a seemingly random value to all areas of the image, making it impossible to read the actual brightness of celestial bodies.
In order to remove the noise pollution, there are a few possible methods one could take. We tried two methods with varying degrees of success.
When taking the photos of each celestial body, we included an extra offset shot of the nearby sky. This shot was to provide us with a reference from which we could determine values to remove from our main photos, in order to remove the noise.
Method 1 – Minima removal
The simplest method of using the offset image is to compare each image with the offset image and generating an array of minima between the two images, as shown below.

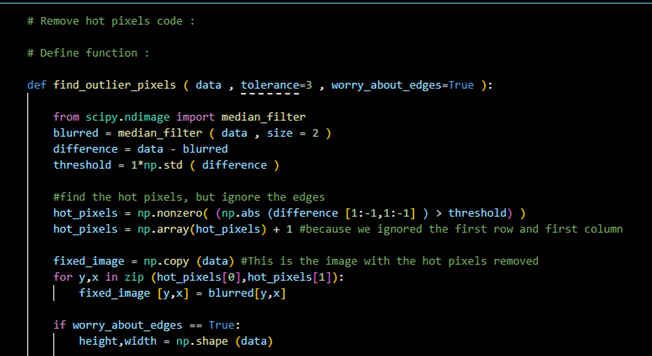
As described, the code generates an image showing the minima between the main images and the offset image, then subtracts this ‘mud’ from the original image to remove the noise pollution. The function backround_removal also needs error handling for underflow errors, as when values go below zero, they wrap back around to the maximum 32 bit integer. This can be avoided by implementing an if statement that checks if any values drop below zero, and returns them to zero.
However, as is now visible, artifacts in the form of dark holes appear on the image with the mud removed that line up with the stars visible in the offset image. In an ideal scenario, you would attempt to find a patch of sky with as few stars as possible in order to avoid this.


Method 2 – Gradient Removal
n order to get rid of the artifacts, we instead found the gradient between the offset image and the 10 images, and from this we generated a noise map that represented the background in each image. Adding another error handler to avoid underflow errors, we then subtract the noise map from the original image, resulting in a clean, artifact free image from which we can extract data.